自然界には 弾性 と呼ばれる物質の性質を持つ物質がいくつかあります。この特性は、材料が外力を受けると変形する可能性があるが、初期状態に戻ると、その材料は弾性材料であり、その変形は可逆的であることを定義します。

これらの弾性材料は、伸長または圧縮されると (たとえば、バネの場合)、 エネルギー を蓄積します。このエネルギーは、体が初期状態に戻るときに放出され、エネルギーが保存されていれば完全に仕事に変換されます。弾性体が蓄積するこのエネルギーを 弾性位置エネルギー といいます。
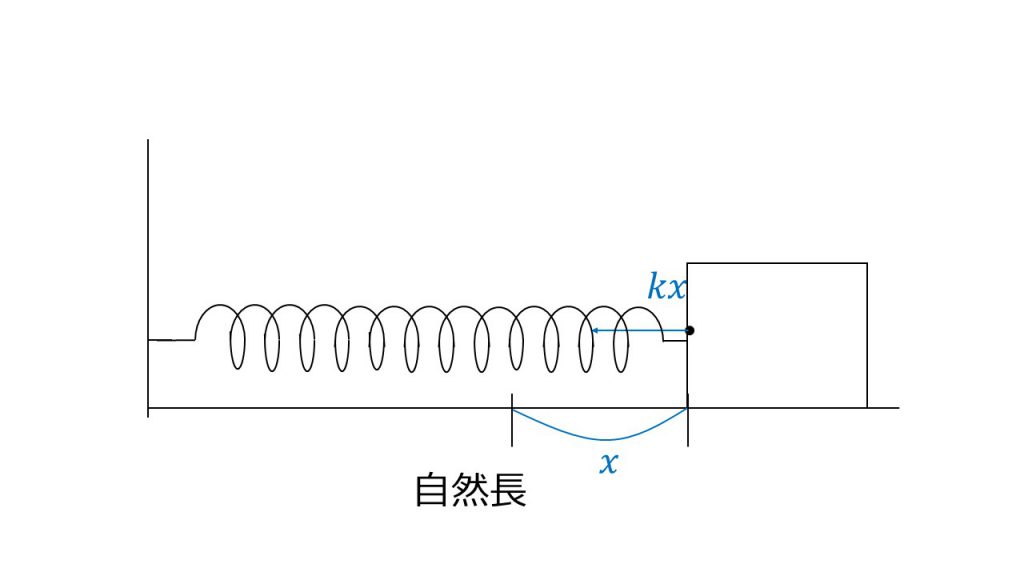
このエネルギーの計算の概要を説明する前に、弾性力を説明する方程式を理解しておく必要があります。伸縮性のあるリボンの両端が取り付けられており、パチンコのようにその中央に石が置かれて保持されていると仮定します。ゴムを引っ張って石を保持すればするほど、より大きな力を加える必要があり、石を投げたときに遠くまで飛びます。言い換えれば、力が大きくなるほど、弾性テープの変形も大きくなります。ロバート フック (1635-1703) は、この考えから、 弾性力は 弾性体が受ける変形に比例すると結論付けました。
力 = 定数 x 変形
力と変形の間のこの比率を等しくする定数は、弾性材料の性質、つまり弾性材料の性質によるものです。2 つのばね が同一である場合もありますが、一方がプラスチックで、もう一方が鋼の場合、プラスチックのほうが有利であることがわかります。鋼の剛性により、さらに変形します。このようにして、 弾性 定数 k が定義されました。これは、弾性材料の製造元となる材料と、以下に示す フックの法則 に依存します。
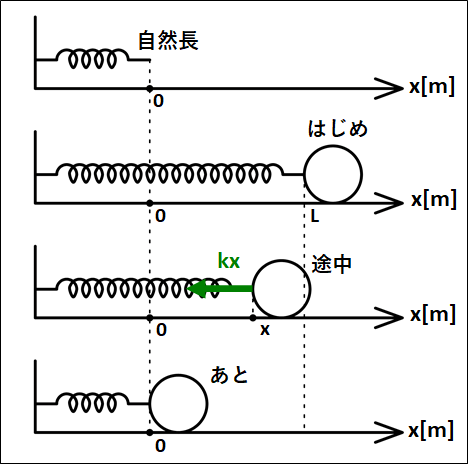
ここで、F は初期位置に対して物体が受ける力 (ニュートン (N) 単位) と変形 (メートル (m) 単位) です。定数 k は N/m で与えられます。方程式の負の符号は、力の方向がこの動きと逆であり、身体がその初期状態に戻ろうとする傾向によるものです。
次に、弾性位置エネルギーの計算を見てみましょう。力モジュールと変形モジュール、それらの間の比率だけを考慮すると、次の F x x のグラフが得られます。

仕事は力と変位の乗算として定義されることがわかっており、まさに上のグラフの面積がそれを表しています。したがって、弾性位置エネルギー (E pel ) によって行われる仕事は、数値的には曲線の下のグラフの面積になります。この領域を計算すると、次の作業が必要になります。
F = k として。 x、モジュールには、

エネルギー保存により、τ = E pel と なります。したがって、次の弾性位置エネルギー方程式に到達します。
ここで、E pel は ジュール (J) で与えられます。
ギャラリー