物体が 重力場 が作用する領域にある場合、物体はその質量 m とそれぞれの局所 重力加速度 g の積によって与えられる 重量力 によって作用されます。一般に、重力加速度モジュールが使用されます。これは、 地球 と同様、重力加速度には半径方向があることが知られており、使用される基準系では正の量が地球の中心から外側を指すため、場の重力 g は次のようになります。下向きにマイナス。このようにして、数学的には、次の方程式で与えられるオブジェクトの重量の係数が得られます。
P = mg
平面上の物体を考えると、その物体を構成する各粒子に作用する重力が存在します。方程式は次のように表します。
Σ F = Σm i 。 g
質量 m の物体がいくつかあります。しかし、物体に作用するすべての力を合計することはできます。このようにして、物体に作用する合計の力を、その総質量と局所的な重力加速度の観点から次のように表す方程式が得られます。
Σ F = g .Σm i = M. g
この物体が 静的平衡状態 にあるためには、図 01 に示すように、ある点で牽引力 T によって吊り下げられるか、またはその基部が面で支えられている、つまりいくつかの点で支えられている必要があります。
 したがって、垂直方向では、力の合計はゼロになります。表面上のオブジェクトの場合、次のようになります。
したがって、垂直方向では、力の合計はゼロになります。表面上のオブジェクトの場合、次のようになります。
Σ F = N – g .Σm i = N – M. g = 0
そして、牽引力によって吊り下げられた物体の場合、次のようになります。
Σ F = T – g .Σm i = T – M. g = 0
結果としてボディに加わるトルクは次の式で与えられます。
Σ τ = Σ( r i xm i . g ) = Σ( mi . r i x g ) = M. r cm x g = r cm x M g
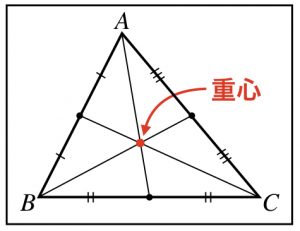
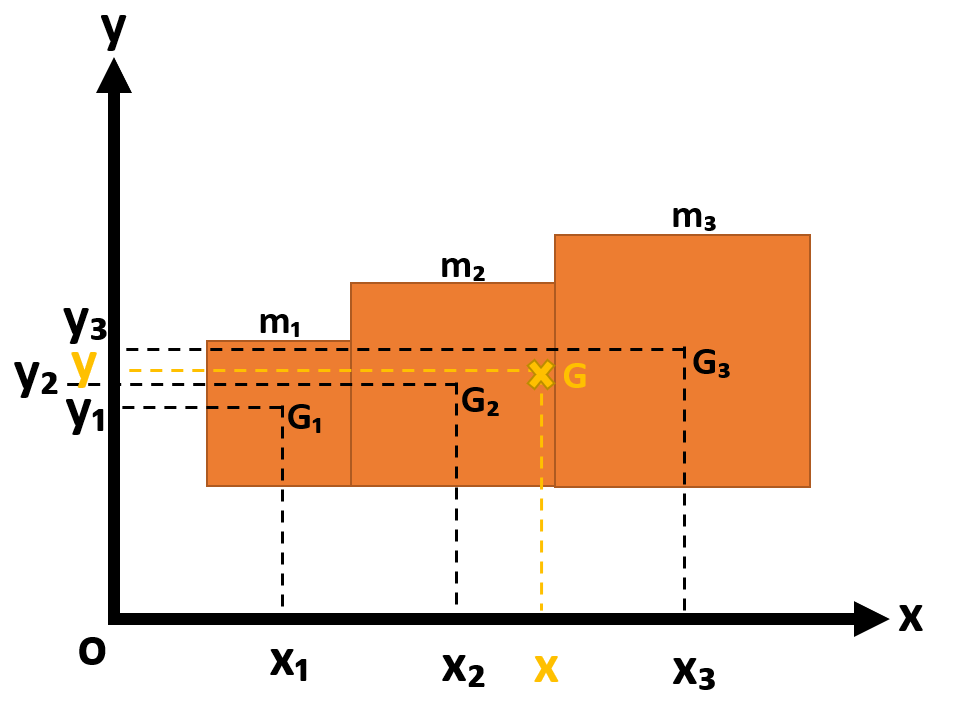
量 m i 。 r i は 、物体を構成する粒子の質量 mi と、各粒子が占めるそれぞれの位置 r i の関数として表され、総質量 M と粒子の位置の関数として書くことができます。図 02 に示すように、 重心 r cm 。
 平衡状態では、質量中心に対するトルクの合計がゼロでなければなりません。つまり、数学的には次のようになります。
平衡状態では、質量中心に対するトルクの合計がゼロでなければなりません。つまり、数学的には次のようになります。
Σ τ = r cm x M g = 0
このようにして、支持ベースの外側にある質量のすべての部分が、それぞれの支持ベースの端の周りにトルクを加えます。
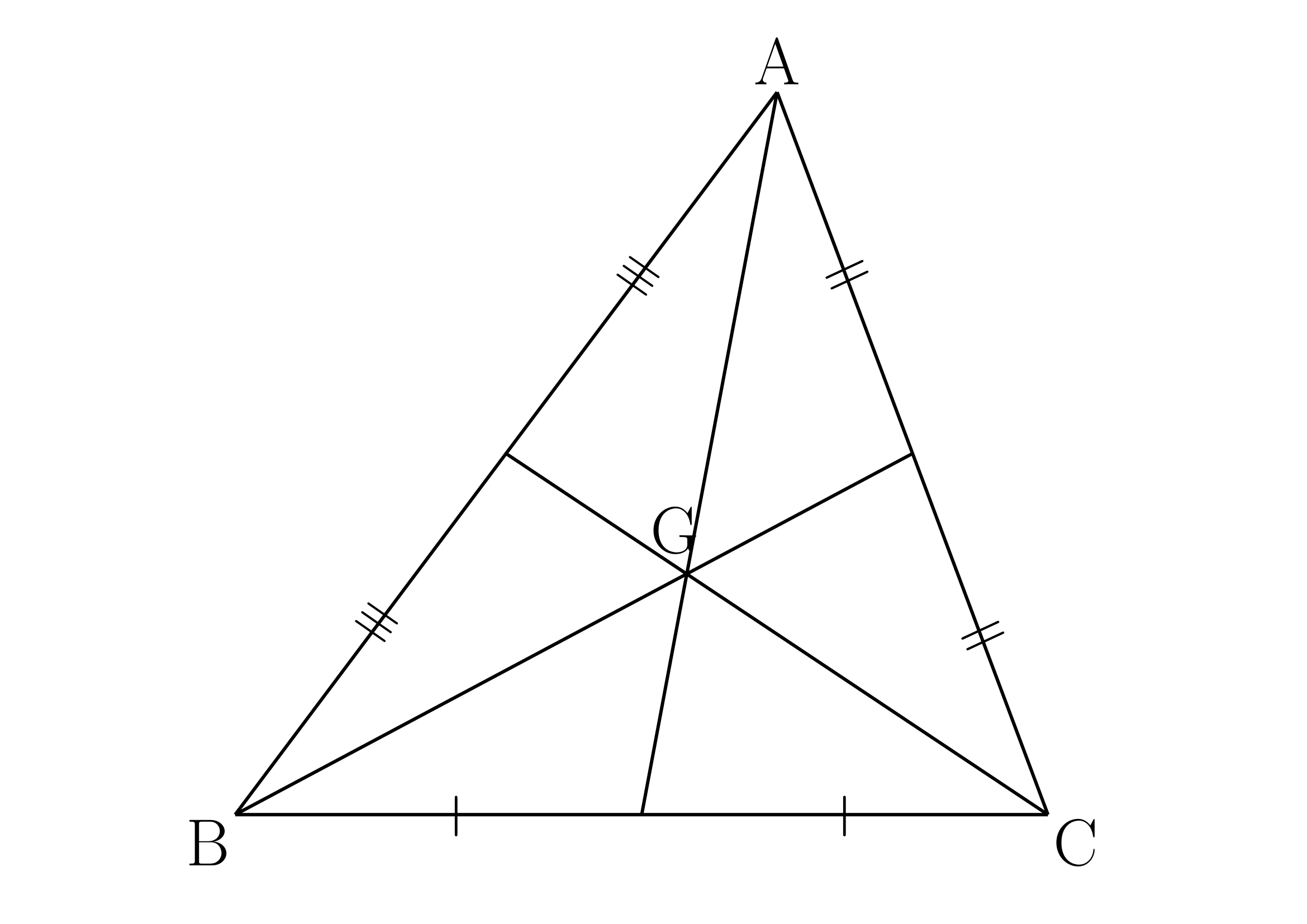
平らな物体の質量中心 r cm を決定するには、非常に簡単です。たとえば、糸によって生成される牽引力によって点で吊り下げ、吊り下げ点から物体の下端まで追跡するだけです。 、 重心の 決め方。次に、体の左側または右側のほぼ中央の高さで、別の吊り下げ点が選択されます。もう一度、垂直にスクラッチします。図 03 に示すように、2 つの線の間の交点、つまり線の交差点に物体の質量中心が位置します。
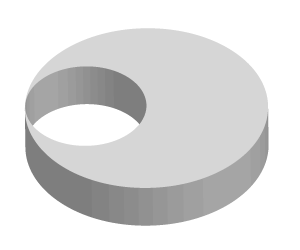
 3 次元を考慮する必要があるオブジェクトの場合は、そのオブジェクトについて考慮される 3 番目の座標軸上に、他の 2 本に垂直なもう 1 本の線を作成する必要があります。この場合、オブジェクトの形状に応じて、オブジェクトの内部に点が配置されます。場合によっては、重心がオブジェクトによって満たされたボリュームの外側にある場合があります。例えば、ある物質のリング状の物体の重心は、空いた領域のほぼ中央に位置する。
3 次元を考慮する必要があるオブジェクトの場合は、そのオブジェクトについて考慮される 3 番目の座標軸上に、他の 2 本に垂直なもう 1 本の線を作成する必要があります。この場合、オブジェクトの形状に応じて、オブジェクトの内部に点が配置されます。場合によっては、重心がオブジェクトによって満たされたボリュームの外側にある場合があります。例えば、ある物質のリング状の物体の重心は、空いた領域のほぼ中央に位置する。
参考文献:
デヴィッド・ハリデー、ロバート・レスニク、クレーン、デネス・S.
『物理学 1』、第 1 巻、4 版、
リオデジャネイロ: LTC、1996 年。
ギャラリー